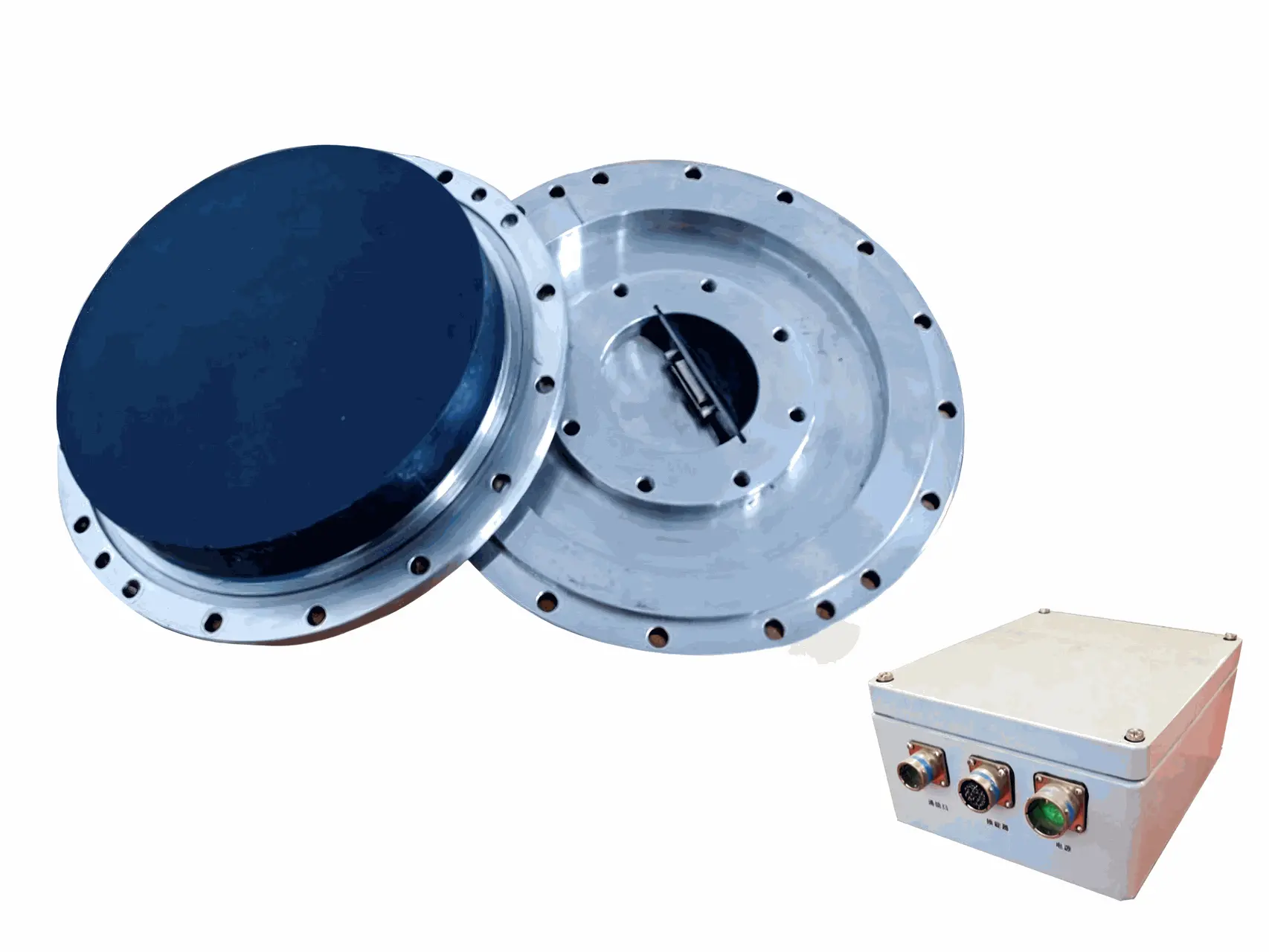
DVL series
Doppler Velocity Log Phased Severs
The Phased-Array Doppler Velocity Log (DVL) series delivers high-precision velocity and altitude measurements for diverse subsea applications. Whether integrated into autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), or oceanographic survey platforms, this series combines advanced phased-array technology with robust engineering to ensure reliable underwater navigation and positioning in challenging marine environments.
Explore all DVL products

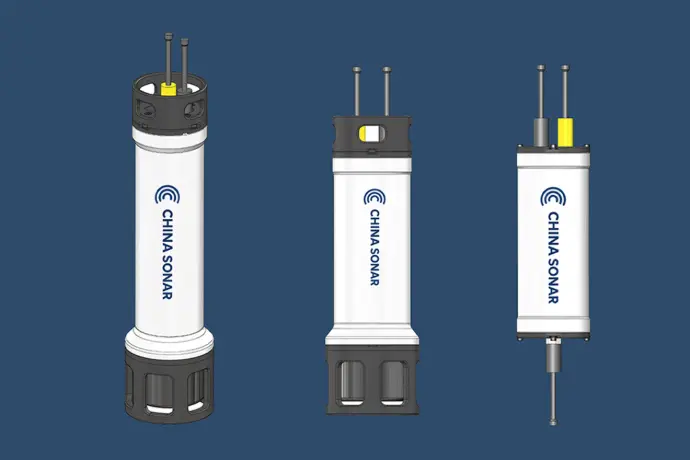
DVL-600K-Phased
High-accuracy bottom tracking: Reliable up to 80 m altitude with a velocity accuracy of ±0.2% ±1 mm/s

DVL-300K-Phased
High bottom tracking performance: Reliable up to 200 m altitude with a velocity accuracy of ±0.3% ±1mm/s.
DVL-150K-Phased
High bottom tracking performance: Reliable up to 300-500 m altitude with a velocity accuracy of
0.5% ± 2 mm/s /
0.3% ± 2 mm/s
Specifications
Applications
-
Autonomous Underwater Vehicles (AUVs)
Compact and large-diameter AUVs, providing precise bottom velocity and altitude measurements for navigation and path control. -
Remotely Operated Vehicles (ROVs)
Inspection-class ROVs, delivering accurate bottom tracking and altitude data in near-bottom or confined environments. -
Uncrewed Surface Vessels (USVs)
Surface platforms, offering reliable speed-over-ground and drift compensation when GPS is unavailable or degraded.

AUV Communication & Navigation Kit
Compact Navigator & Underwater Acoustic Modem
Designed for Autonomous Underwater Vehicles (AUVs), the AUV Communication & Navigation Kit delivers high-precision navigation and reliable underwater communication in a unified solution.
- NAVS-3000 Compact Navigator — Provides INS-based positioning, DVL velocity measurements, and depth data for precise real-time navigation.
-
UAC-08160X-OEM Underwater Acoustic Modem — Ensures stable, long-range underwater communication across multiple frequency bands.
Principle of Doppler Velocity Log (DVL)
A Doppler Velocity Log (DVL) measures underwater velocity using the Doppler effect. The instrument transmits acoustic signals toward the seabed and receives the echoes. By calculating the frequency shift between transmitted and returned signals, the DVL determines the vehicle’s relative velocity in three dimensions. This principle makes the DVL a critical sensor for subsea navigation where GPS is unavailable.
Bottom-Track Mode
In bottom-track mode, the DVL locks onto the seabed as a fixed reference point:
- Acoustic beams are transmitted toward the bottom and reflected back.
- Frequency shifts are analyzed to compute the vehicle’s velocity over ground.
- This mode provides high-accuracy velocity and positioning, enabling reliable navigation for ROVs, AUVs, and subsea platforms even in deep water.
Advantages of Phased-Array DVL
Our phased-array DVL design offers significant performance benefits over conventional systems:
- Beamforming and control – electronically steered beams deliver stronger echoes and higher accuracy.
- Superior interference rejection – phased-array processing minimizes noise and multipath effects in challenging environments.
- Reduced minimum altitude (smaller blanking zone) – effective tracking even when operating close to the seabed.
- Enhanced reliability – multi-beam redundancy ensures consistent and stable measurements.
Explore the UAM-08160X Series
The UAM-08160X Series includes the portable II2S, the 3000 m-rated IE3S, the 6000 m deep-sea SE4T, and the highly integrable OEM system solution. Whether for shallow-water trials, coastal monitoring, or deep-sea engineering and system integration, the UAM-08160X Series delivers reliable performance for diverse underwater acoustic modem needs.